Section: New Results
Stability and control design of asynchronous interconnected systems
New approaches for stability conditions design
-
Stability for asynchronous sampled data systems
Participants : A. Seuret [Contact person] , C. Briat [KTH] , J. Gomès Da Silva Jr. [UFRGS] , W. Jiang, M. M. Peet [Illinois Institute of Technology] .
During the last year an important effort has been devoted to controlled systems under communication constraints. In particular a novel approach to assess stability of continuous linear systems with sampled-data inputs has been provided for the first time in [21] . The main contribution of this article is to make the bridge between the discrete-time and the continuous-time approaches to ensure stability of the closed loop system. The interest of the method remains in the application of the discrete-time Lyapunov theorem using the continuous-time model without introducing exponential. This method suggests the introduction of particular types of functionals of several shapes: using an adaptation of classical time-delay functionals [21] ; using a discretization method [26] ; or using SOS [44] .
Then extensions to uncertain systems, time-varying parameter systems [21] ; or non linear systems (for instance with saturations [36] , [43] ) become straightforward in comparison to the discrete-time approaches. The stability conditions are expressed in terms of linear matrix inequalities. Sufficient conditions for asymptotic and exponential stability are provided dealing with synchronous and asynchronous samplings and uncertain systems. An additional stability analysis is provided for the cases of multiple sampling periods and packet losses in [21] . Moreover this method has also been extended to the case of sampled-data systems with additional input delay [42] , [46] and to the case of impulsive systems (several papers are submitted on this topic, for example [65] ).
-
Stability of control under weakened real-time constraints
Participants : D. Simon [Contact person] , A. Seuret, P. Andrianiaina [AIRBUS] .
A weakened implementation scheme for real-time feedback controllers is proposed to reduce the conservatism due to traditional worst-cases considerations. To save wasted computing resources, new real-time scheduling scenarios allowed for reducing the time slots allocated to control tasks below the value of the Worst Case Execution Time which is traditionally used to implement embedded control software. The stability of the control system under occasional deadlines miss is assessed using robustness arguments, using Lyapunov-Krasovskii functionals and LMIs solving based on [46] . The methodology has been successfully assessed for a fighter aircraft pitch controller, which show that the stability of the plant can be kept (and even improved) using the new scheduling schemes using less computing resources than traditional implementations [24] , [63] .
Control for asynchronous sampled data systems
-
Control architecture and tools
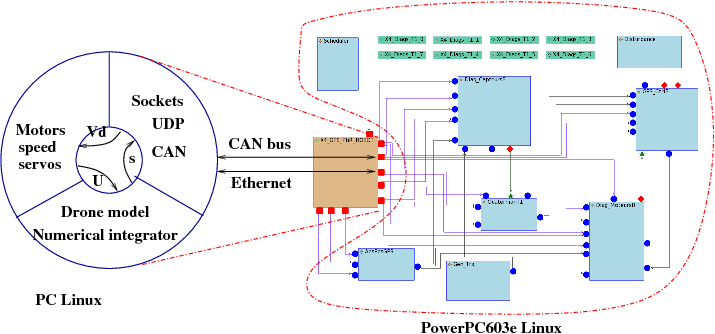
Participants : D. Simon [Contact person] , R. Pissard [SED] , S. Arias [SED] .
During the development of control systems, hardware-in-the-loop that is showed in Fig. 6 takes place between design level simulations and costly experiments with the real plant. Using the prototype of Orccad V4 several HIL real-time simulators have been set up. These simulators combine multi-threaded/multi-rate real-time controllers running control algorithms synchronized with a variable step numerical integrator running a model of the plant [49] . These simulators have been further used to implement and test several kind of feedback/flexible scheduling schemes related to the FeedNetBack project, in particular real-time controllers subject to (m,k)-firm scheduling, Kalman filters modified to account for data loss and varying sampling controllers [62] . Finally a collaboration with Sardes about the integration of discrete (logical) control loops on top of continuous control tasks has been carried on. In this architecture Orccad is used to design the low level continuous controllers while the reactive parts are designed and synthesized using the BZR language [23] .
-
Event-based control algorithms
Participants : A. Seuret [Contact person] , N. Marchand [Contact person] , S. Durand.
Asynchronicity is becoming more and more meaningful in modern control architectures and some new control strategies are being developed by some research teams in the world. The principle of these control laws is to compute a new control signal only when some event occur, where a event characterizes a change in the system and therefore a need for a new control. These approaches are supposed to reduce the number of times the control is computed (and consequently the CPU utilization) and to remove the real-time hard constraint on the computational system. Some works around this domain have been proposed by some members of the NeCS team.
In [45] , one may look at the problem of reducing the amount of information to be sent to the actuators through the Network. Indeed the controller may be able to trigger the information to be sent. The main idea is to let the controller decide if the system needs an update of its control input. This class of control algorithms is called event-triggered. An algorithm is suggested to sample the control input based on the behavior of a Lyapunov-like function in [45] . This algorithm is event-triggered since the Lyapunov-like function directly depends on the state of the systems.
In [69] and [73] , we firstly proposed to remove the safety limit condition introduced by K-E. Årzén in his event-based PID controller [93] . In this paper, the control signal is updated only when required from a performance point of view, that is when the measurement crosses a given level. Årzén also suggested to enforce an event when the sampling interval achieves a given maximal amount of time. This safety limit was added to prevent the system to be sampled less than what Shannon theorem requires but, in fact, we showed that the Shannon sampling condition is no more consistent in the context of event-based systems. Moreover, a practical implementation of a cruise control mechanism on a small radio-controlled vehicle was recently suggested [34] . Moreover, we are interested on updating the control signal only when required from a stability point of view. Such a solution consists for instance in enforcing an event when a Lyapunov function crosses a given level. Based on the seminal work from M. Velasco in [90] , we suggested a simple Lyapunov sampling in [33] .
-
Control with adaptive sampling
Participants : D. Simon [Contact person] , O. Sename, E. Roche.
Control and real-time computing have been associated for a long time, for the control of industrial plants and in embedded or mobile systems, e.g. automotive and robotics. However both parts, control and computing, are often designed with poor interaction and mutual understanding. We propose here an integrated control and scheduling co-design approach, where closing the loop between the control performance and the computing activity is promising for both adaptivity and robustness issues. We developed during the last years a variable sampling control methodology based on the LPV (Linear Parameter Varying) framework and control synthesis, where the sampling interval is used as a known and controlled variable [8] . Few assumptions about sampling are needed for this control design : the main point is that the control interval is known and lies between the predefined bounds , whatever the origin of the control interval variations, its speed and its frequency. Another approach is proposed now to design sampling varying gain-scheduled controller for LPV systems, based on the Linear Fractional Representation (LFR). This method has already been studied concerning the synthesis of discrete-time gain-scheduled controller, depending only on the sampling period. The method has been extended to deal with the design of a gain scheduled LFT controller w.r.t the sampling interval and w.r.t system's parameters, given a discrete-time Linear Fractional Representation (LFR) of the LPV varying sampling model [13] . The approach comes from the robust control theory and consists in separating the LTI part (not depending on the set of parameters) from the varying part (parameters or uncertainties), as shown on Fig. 7 . The matrix represents the influence of the set of parameters on the plant. From this model, a gain scheduled controller can be computed, depending on the same set of parameters , or a subset of . The LFT approach proposed in [83] has been extended to set a LFR model that accounts for system and sampling parameters. In that case the uncertainty matrix is as depicted in Fig. 7 on the right, where is the deviation of the sampling interval w.r.t. the nominal sampling rate and account for the plant's uncertainty. A controller is then synthesized using the framework, where weighting functions allow to shape the control system's response [82] .
In the framework of the FeedNetBack IST project, the LFR formulation previously presented is applied to an Autonomous Underwater Vehicle (AUV) for the control of its altitude [40] . The global control structure is presented on Fig. 8 . To control the altitude, two controllers are considered ( and ) based on two models ( and ). The LFR formulation is used here to keep some varying parameters into the model formulation. Indeed, in previous works, the limits of a simple linearization around a fixed equilibrium point have appeared. When the pitch angle is too far from 0 (the value chosen for at equilibrium), the linearized model becomes too different from the linearized one, which leads to bad performances. The block contains the varying part of the model, which depends on the linearization point (). The two considered varying parameters are and . The model is then discretized and the sampling period is added to the parameter block. Compared with the previous approach using a linearized plant model, the new one shows (in simulation) improved altitude tracking and a better utilization of the available range of the actuators [82] .